RQ-4 Global Hawk
Gabriel P. Riccio
4.5 Research Assignment Unmanned System Data Protocol and Format
UNSY 605 Unmanned Systems Sensing, Perception, and Processing
Embry-Riddle Aeronautical University-Worldwide
The
RQ-4 Global Hawk is a highly sophisticated unmanned aerial system (UAS) capable
of performing high altitude, long endurance (HALE) aerial surveillance and
reconnaissance over large geographical areas for the purpose of providing data
to battlefield commanders ("RQ-40 Block 40 Global Hawk,"
2012). Outfitted with air to surface
radar, the Global Hawk can monitor both fixed and moving targets in all weather
conditions (“RQ-40 Block 40 Global Hawk," 2012). The platform grew out of a 1990s DARPA
(Defense Advanced Research Projects Agency) program ("Northrop Grumman
RQ-4 Global Hawk - Copybook," n.d.).
The first Global Hawk produced by Northrop Grumman was the RQ-4A Block
10; the most current version is Block 40 ("Northrop Grumman RQ-4 Global
Hawk - Copybook," n.d.). A
breakdown of the nomenclature RQ-4 is as follows: the “R” means reconnaissance,
the “Q” means unmanned, and the digit “4” represents the fourth type ("Northrop
Grumman RQ-4 Global Hawk - Copybook," n.d.).
The original RQ-4A was equipped with
electro-optical and infrared sensors along with synthetic aperture radar (SAR)
("Northrop Grumman RQ-4 Global Hawk - Copybook," n.d.). Later models
of the Global Hawk came with imagery intelligence sensors, airborne signal intelligence
payload sensors, the multi-platform radar technology insertion program system,
and active electronically scanned array radar
("Northrop Grumman RQ-4 Global Hawk - Copybook," n.d.). It is important to highlight that the Global
Hawk is a complete system. In addition
to the aircraft and payloads/sensors, it establishes data links for data download;
it is controlled by the ground stations, and requires a lot of logistical support
(Kinzig, 2010). The on-board
communication system enables command and control of the platform, its payload,
and the ability to transfer data (Kinzig, 2010). The data can be disseminated by ultra-high
frequency line of sight (UHF LOS), common data link line of site (CDL LOS), Ku
band satellite communications, UHF satellite communications, and other
satellite communications (Kinzig, 2010).

Figure 1. The many methods of
disseminating Global Hawk data. Adapted from “Global Hawk
systems engineering case study” by B. Kinzig (2010). Retrieved from www.dtic.mil/dtic/tr/fulltext/u2/a538761.pdf
As stated previously, the
biggest evolution in the platform has been the upgrades to the
sensor packages. The imagery intelligence payload which
consists of the electro-optical and
infrared sensor (EO/IR), and synthetic
aperture radar (SAR) collect high resolution imagery for the purpose of
intelligence gathering (RQ-4B Global Hawk block 30 operational test
and evaluation report, 2011).
Radio frequency signals are collected by the signal intelligence payload
whereupon they are processed to support intelligence operations; additionally they
are capable of automatic signal detection, the location of the signal, signal
direction, and signal identification (RQ-4B Global Hawk block 30 operational test
and evaluation report, 2011). Refer to Figure 1 and Figure 2 to
for sensor summary data. The data
formats are NTIF (National Imagery Format) standard 2.1 meaning the data format
complies with prescribed military standards which increase capability and
flexibility as compared to previous formats ("National Imagery
Transmission Format Standard (NITFS)”, n.d.).
NITF 2.1 does have backward compatibility with earlier formats; it includes
JPEG (Joint Photographic Experts Group) compression, newer decompression
algorithms, and CGM (Computer Graphics Metafile) for graphics (“National Imagery Transmission
Format Standard (NITFS)”, (n.d.).
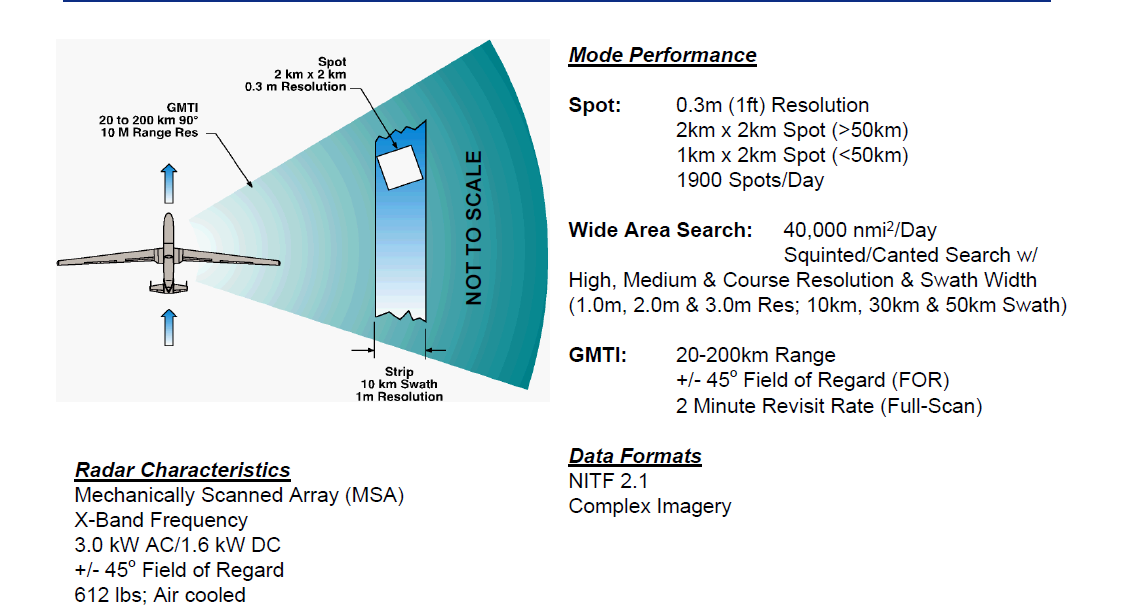
Figure 2. Global Hawk SAR sensor summary
data. Adapted from “Global Hawk program overview”, (2011). Retrieved from https://www.faa.gov/about/office_org/headquarters_offices/avs/offices/aam/cami/library/online_libraries/aerospace_medicine/sd/media/GH_Program_Overview_Briefing.pdf

Figure 3. Global Hawk
EO/IR sensory summary data. Adapted from “Global Hawk
program overview”, (2011). Retrieved from https://www.faa.gov/about/office_org/headquarters_offices/avs/offices/aam/cami/library/online_libraries/aerospace_medicine/sd/media/GH_Program_Overview_Briefing.pdf
The Global Hawk will most likely continue
to upgrade its sensor suite as technology improves, and or the mission changes.
As of Block 30, there are no means for the Global Hawk to conduct autonomous
operations and record data if data links are lost. During this research, it was
discovered that it was recommended in the “RQ-4B Global
Hawk block 30 operational test and evaluation report”, (2011) that data recording be
implemented for “off-tether” missions.
All research on Block 40 indicates that data recording functionality has
not been implemented as of yet.
Therefore, it is recommended that this functionality be added to meet
operational needs in the event of a communications failure from the UAS to the
control station. Additionally, during this research, power required for the
sensor payload suites were not listed; however the platform has an on-board
electric generator which supplies 25 kilo-volt-amperes to the platforms AC
(alternating current) electrical system (Kinzig, 2010).
References
Global Hawk
program overview [PowerPoint slides]. (2011). Retrieved from https://www.faa.gov/about/office_org/headquarters_offices/avs/offices/aam/cami/library/online_libraries/aerospace_medicine/sd/media/GH_Program_Overview_Briefing.pdf
Kinzig, B. (2010). Global
Hawk systems engineering case study. Air Force Center for Systems
Engineering, Air Force Institute of Technology, Wright Patterson, OH. Retrieved from www.dtic.mil/dtic/tr/fulltext/u2/a538761.pdf
National Imagery Transmission
Format Standard (NITFS). (n.d.). Retrieved from http://www.globalsecurity.org/intell/systems/nitfs.htm
Northrop Grumman RQ-4 Global Hawk
- Copybook. (n.d.). Retrieved from http://www.copybook.com/military/fact-files/northrop-grumman-rq-4-global-hawk
RQ-4B
Global Hawk block 30 operational test and evaluation report. (2011). Retrieved from http://pogoarchives.org/m/ns/pentagon-ot-and-e-eval-rq-4b-global-hawk-20110526.pdf
RQ-40
Block 40 Global Hawk. (2012). Retrieved from http://www.northropgrumman.com/Capabilities/GlobalHawk/Documents/Datasheet_GH_Block_40.pdf


